Empowering A* Algorithm With Neuralized Variational Heuristics for Fastest Route Recommendation
IEEE TKDE 2023
- Paper
- 无开源代码
0. Summary
0.1 本文解决的问题
把路线推荐算法当作路线规划问题,使用A*算法。SOTA模型使用神经网络估计g()和h()函数。
h()不应当被过度估计,否则会产生次优解。
g()应当足够精确。现有方法分别预测每一个边的时间,最后把所有时间相加。应当结合已通过路径的上下文和顺序性特征,预测整个路径的通过时间。
0.2 本文的主要贡献
- 用序列模型预测整个已通过路径的时间。
- 提出使用variational inference学习h()的分布,因此可以获得一个admissible的(高置信的)h()值,避免次优解。
- 用GAN生成类似g()估计器的路径表示,用于把g()中获得的最快路径信息传输给h()
1. Background
路径推荐任务:基于历史路径数据,给定source node 和 destination node,预测 most likely route。
1.1 Baselines
- NASF: 使用A*和神经网络估计g()和h()
1.2 Problem Formulation
最佳路径 由路网图 和 query 预测得到:
A*算法:
g(): observable path / path-aware
h(): path-blind
2. Method

2.1 g()估计器
2.1.1 Attribute Embedding Component
Topological features
使用 DeepWalk 进行 Edge embedding。
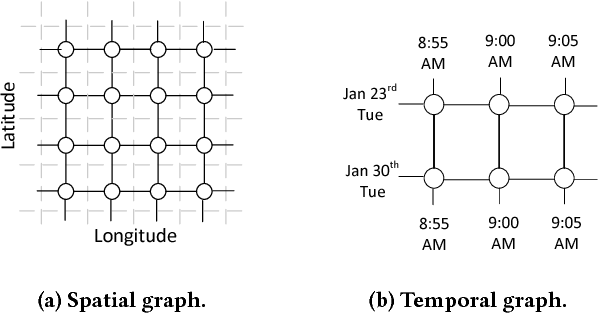
Temporal features
按照[1]的方法创建时域图。使用 Node2Vec 进行 Node embedding。
External features
- weather, holiday: one-hot encoding
- recent traffic condition: normalized average traffic time of road segments in the last 24 hours
最后把以上信息Concatenate,得到每一个边上的representation:.
2.1.2 Sequentiality Modeling Component
使用BiLSTM处理每一个path上的edge。BiLSTM在第 个edge上的输出是 和 。
2.1.3 Multi-Task Learning Component
使用最后一个(第t个)edge上的 作为总可见路径的信息,同时把 作为从出发点走过的i个边组成的子路径的信息。
使用两个Head分别对subpath和path做时间预测:
使用MSE作为Loss:
2.2 h()估计器
2.2.1 Representation Learning of Heuristic Inputs
的输入是整个可见路径 ,但的输入只有当前节点和终点。但是两个估计器的目的是一样的:估算最短时间。
第一个idea是仿照[3]的方法,用当前节点和终点之间的shortest path估计最短时间。但是shortest和fastest有所不同,因此直接使用会引入噪声。
第二个idea是同时学习和,让学习提取最快路径的信息。
Fastest Path - GAN
首先,手动找到从 到 的 fastest path,然后用 编码作为 ground truth 。
generator:
如何得到?论文原文:
Specifically, we first use the representation of road segments in the g(⋅) estimator to initialize the representation of the two nodes
没懂
discriminator:
生成的 在多个下游任务上同时训练:最快路径长度、最快路径转弯数等。
这里的和都是MLP。相当于强行让记住,对于特定的图,任意两个节点之间的最快路径。
Shortest Path - GRU
按照[3]的经验, K shortest path也可以用来估计h。从 到 的最短路径作为 GRU 的输入,得到 , 用来预测从 到 的最快时间。
最后结果采用和的动态门控加权和。
2.2.2 Variational Inference Based Prediction
[5]和[19]分别证明了高斯分布可以对交通情况和交通速度建模。把交通情况记作 ,把交通速度记作 ,假设这两个量 和 遵循高斯分布。
又因为,所以可以估计从节点到节点的时间。
论文原文说 遵循Inverse Gaussian distribution。应该是错了。应该遵循Reciprocal normal distribution
两个条件分布可以看成是VAE,因此用VAE建模训练。
给定最短时间的置信度理论上是 ,但还是额外学习了一个置信度。
如何获得Decoder输出的分布?贝叶斯线性回归?
Reference
- Li, Yaguang, et al. Multi-task representation learning for travel time estimation. Proceedings of the 24th ACM SIGKDD international conference on knowledge discovery & data mining. 2018. ↩